Unity で鹿の AI を作る方法
ゲーム開発において、人工知能 を追加することは、外部入力なしでゲーム エンティティを制御するコードを記述することを意味します。
ゲームにおける動物 AI は、動物の行動をゲームのデジタル環境に変換して現実的な体験を作り出すことを目的とした AI の一分野です。
このチュートリアルでは、Unity でアイドルと逃走の 2 つの状態を持つ単純な動物 (鹿) AI を作成する方法を示します。
ステップ 1: シーンと鹿のモデルを準備する
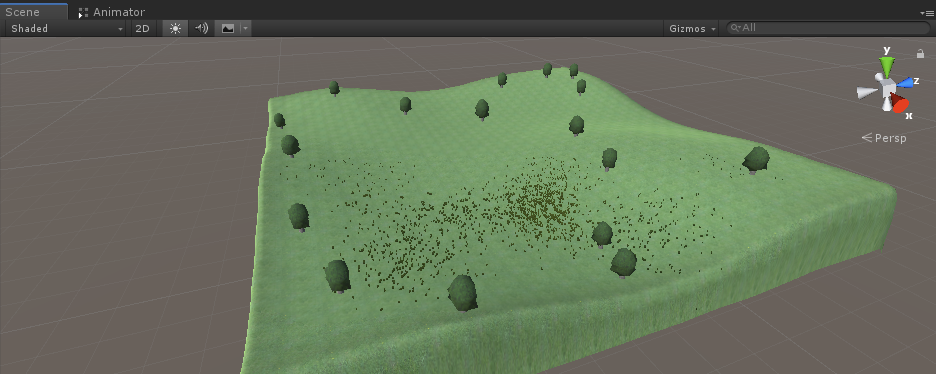
水準器と鹿のモデルが必要です。
レベルには、いくつかの草と木のある単純な地形を使用します。
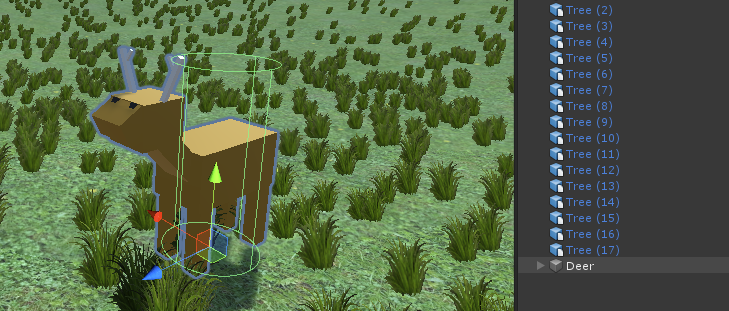
鹿モデルでは、いくつかのキューブ (ただし、この 鹿モデル を使用することもできます) を組み合わせました。

それではコーディング部分に移りましょう。
ステップ 2: プレーヤー コントローラーをセットアップする
まず、プレイヤー コントローラーをセットアップして、歩き回って AI をテストできるようにします。
- という新しいスクリプトを作成し、SC_CharacterController という名前を付けて、その中に以下のコードを貼り付けます。
SC_CharacterController.cs
using UnityEngine;
[RequireComponent(typeof(CharacterController))]
public class SC_CharacterController : MonoBehaviour
{
public float speed = 7.5f;
public float jumpSpeed = 8.0f;
public float gravity = 20.0f;
public Camera playerCamera;
public float lookSpeed = 2.0f;
public float lookXLimit = 45.0f;
CharacterController characterController;
Vector3 moveDirection = Vector3.zero;
Vector2 rotation = Vector2.zero;
[HideInInspector]
public bool canMove = true;
void Start()
{
characterController = GetComponent<CharacterController>();
rotation.y = transform.eulerAngles.y;
}
void Update()
{
if (characterController.isGrounded)
{
// We are grounded, so recalculate move direction based on axes
Vector3 forward = transform.TransformDirection(Vector3.forward);
Vector3 right = transform.TransformDirection(Vector3.right);
float curSpeedX = speed * Input.GetAxis("Vertical");
float curSpeedY = speed * Input.GetAxis("Horizontal");
moveDirection = (forward * curSpeedX) + (right * curSpeedY);
if (Input.GetButton("Jump"))
{
moveDirection.y = jumpSpeed;
}
}
// Apply gravity. Gravity is multiplied by deltaTime twice (once here, and once below
// when the moveDirection is multiplied by deltaTime). This is because gravity should be applied
// as an acceleration (ms^-2)
moveDirection.y -= gravity * Time.deltaTime;
// Move the controller
characterController.Move(moveDirection * Time.deltaTime);
// Player and Camera rotation
if (canMove)
{
rotation.y += Input.GetAxis("Mouse X") * lookSpeed;
rotation.x += -Input.GetAxis("Mouse Y") * lookSpeed;
rotation.x = Mathf.Clamp(rotation.x, -lookXLimit, lookXLimit);
playerCamera.transform.localRotation = Quaternion.Euler(rotation.x, 0, 0);
transform.eulerAngles = new Vector2(0, rotation.y);
}
}
}![]()
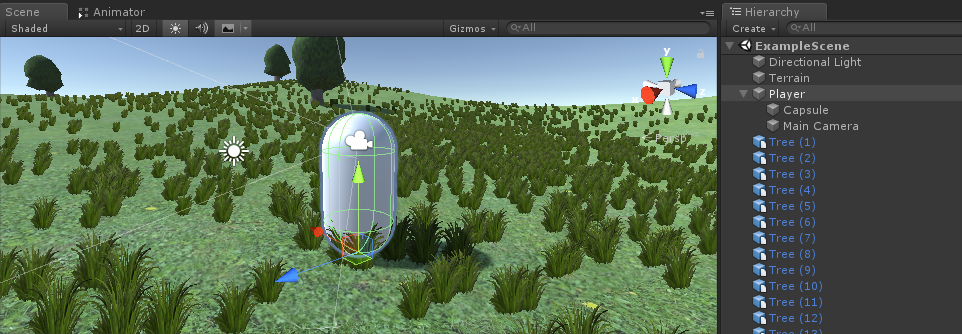
- 新しいゲームオブジェクトを作成し、"Player" という名前を付け、タグを次のように変更します。 "Player"
- 新しいカプセルを作成し (ゲームオブジェクト -> 3D オブジェクト -> カプセル)、それを "Player" オブジェクトの子オブジェクトにして、その位置を (0, 1, 0) に変更し、その CapsuleCollider コンポーネントを削除します。
- メイン カメラを "Player" オブジェクト内に移動し、その位置を (0, 1.64, 0) に変更します。
- SC_CharacterController スクリプトを "Player" オブジェクトにアタッチします (キャラクター コントローラーと呼ばれる別のコンポーネントも追加されることがわかります。その中心値を (0, 1, 0) に設定します)
- メインカメラを SC_CharacterController の "Player Camera" 変数に割り当て、シーンを保存します
これでプレーヤーコントローラーの準備が整いました。
ステップ 3: Deer AI をプログラムする
それでは、Deer AI をプログラムする部分に移りましょう。
- という新しいスクリプトを作成し、SC_DeerAI という名前を付けます (このスクリプトは AI の動きを制御します)。
![]()
SC_DeerAI を開き、以下の手順を続けます。
スクリプトの開始時に、必要なクラスがすべて含まれていることを確認します (特に UnityEngine.AI)。
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{次に、すべての変数を追加しましょう。
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>(); 次に、 void Start() ですべてを初期化します。
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}(ご覧のとおり、トリガーとしてマークされた球体コライダーを追加します。このコライダーは、敵が侵入したときに認識領域として機能します)。
実際の AI ロジックは、いくつかのヘルパー関数を使用して void Update() で実行されます。
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}(各状態は、次の状態の値と NavMesh Agent ターゲットを初期化します。たとえば、アイドル状態には 2 つの可能な結果があり、敵が存在する場合は実行状態を初期化し、敵が認識領域を横切らなかった場合は食事状態を初期化します。
歩行状態は、新しい目的地に移動するために、食事状態の間に使用されます。
走行状態は敵の位置を基準とした方向を計算し、そこから直接走行します。
コーナーでスタックした場合、AI は以前に保存されたアイドル位置の 1 つに後退します。AI が敵から十分に離れると、敵は見失います)。
最後に、Sphere Collider (別名アウェアネス エリア) を監視し、敵が近づきすぎると実行状態を初期化する OnTriggerEnter イベントを追加します。
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}プレイヤーがトリガーに入るとすぐに、敵の変数が割り当てられ、アイドル状態が初期化され、その後、実行状態が初期化されます。
以下は最終的な SC_DeerAI.cs スクリプトです。
//You are free to use this script in Free or Commercial projects
//sharpcoderblog.com @2019
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>();
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}
}- Deer モデル をシーンに配置し、NavMesh Agent、SC_DeerAI スクリプト、および Animator コンポーネントをそれにアタッチします。
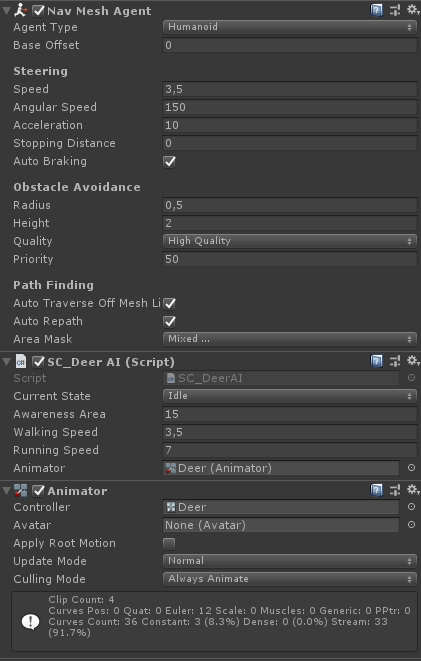
SC_DeerAI には、割り当てる必要がある変数が 1 つだけあり、それは "Animator" です。
アニメーター コンポーネントには、4 つのアニメーション (アイドル アニメーション、歩行アニメーション、食べるアニメーション、実行アニメーション) と 3 つのブール パラメーター (isEating、isRunning、isWalking) を備えたコントローラーが必要です。
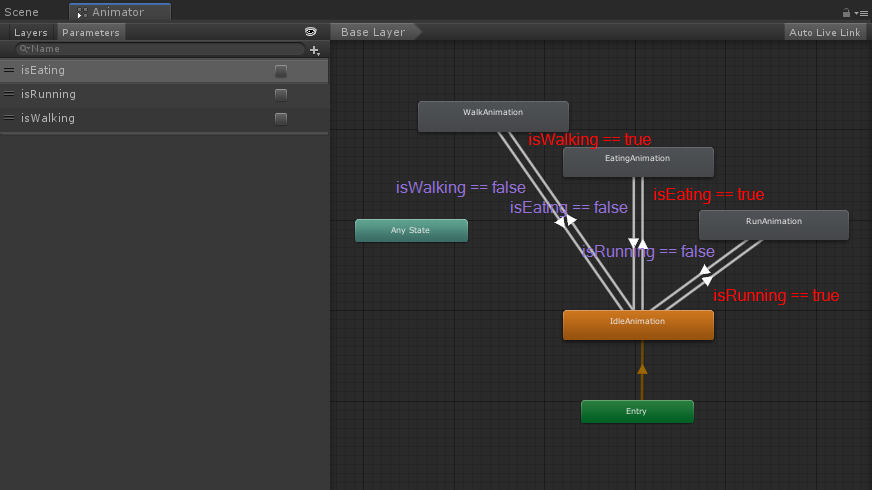
ここをクリックすると、簡単なアニメーター コントローラーをセットアップする方法を学ぶことができます。
すべてを割り当てたら、最後に行うべきことが 1 つ残っています。それは、NavMesh をベイクすることです。
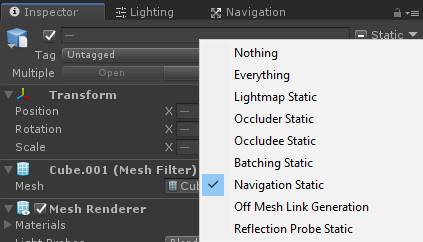
- 静的になるすべてのシーン オブジェクト (例: 地形、樹木など) を選択し、それらを "Navigation Static" としてマークします。
- ナビゲーション ウィンドウ (ウィンドウ -> AI -> ナビゲーション) に移動し、"Bake" タブをクリックしてから、"Bake" ボタンをクリックします。NavMesh がベイクされると、次のようになります。
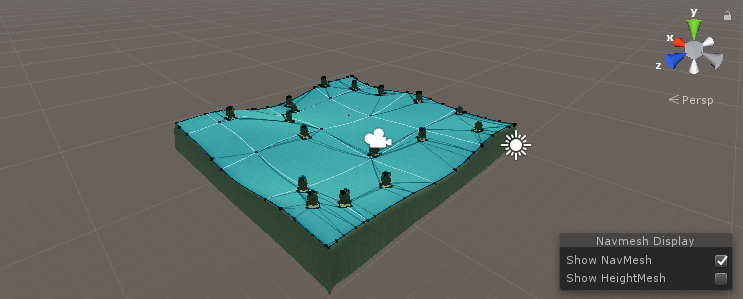
NavMesh がベイクされた後、AI をテストできます。

すべてが期待どおりに機能します。鹿は敵が近づくと逃げ出し、敵が十分に遠ざかると通常の活動を再開します。